中空闆周轉箱搬運端手位置的(de)人(rén)機工程學設計
 來(lái)源:東莞市大朗昌盛包裝制品廠
發布日期:2019-11-21 10:31:20
來(lái)源:東莞市大朗昌盛包裝制品廠
發布日期:2019-11-21 10:31:20
周轉箱也(yě)稱爲物(wù)流箱,在物(wù)流運輸、配送、儲存、流通(tōng)等環節應用(yòng)廣泛。在物(wù)流管理(lǐ)越來(lái)越被廣大(dà)企業重視的(de)今天,周轉箱幫助完成物(wù)流容器的(de)通(tōng)用(yòng)化(huà)、一體化(huà)管理(lǐ),是生産及流通(tōng)企業進行現代化(huà)物(wù)流管理(lǐ)的(de)必備品。由于塑料具有無毒、無味、防潮、耐腐蝕、重量輕、耐用(yòng)、可(kě)堆疊、外觀華麗、顔色豐富等特點,因而中空闆周轉箱占有整個(gè)周轉箱市場(chǎng)的(de)絕大(dà)部分(fēn)份額。由于在使用(yòng)過程中經常需要人(rén)工搬運,故而各類周轉箱上都設有方便人(rén)工搬運的(de)端手位置。采用(yòng)人(rén)工搬運作業時(shí),箱體的(de)重量、外形尺寸以及搬運方式必須适合人(rén)工作業。
中空闆成型後适用(yòng)于電子,包裝,機械,輕工,郵政,食品,醫藥,農藥,家電,廣告,裝潢,文化(huà)用(yòng)品,光(guāng)磁技術、生物(wù)工程,醫藥衛生等各種行業領域的(de)相關中空闆制品。

1 提出問題
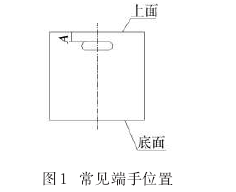
觀察各種中空闆周轉箱的(de)端手位置,幾乎無一例外的(de)将端手位置開在箱體對(duì)稱中心線的(de)兩側靠上沿位置,見圖1。A爲端手位置與上緣間距離,一般情況下(xià)A=25~50 mm,端手孔的(de)尺寸一般爲 90 mm(長(cháng))×30mm(寬)。對(duì)于單個(gè)搬運的(de)周轉箱,這(zhè)種設計是有其合理(lǐ)性的(de)。因爲物(wù)品的(de)重心與箱體的(de)中心基本重合,而且單個(gè)箱體的(de)高(gāo)度一般不超過340 mm,把箱子從地面擡到腰部,工人(rén)隻需彎腰、屈膝、伸臂,便可(kě)将箱子擡起到腰部以下(xià)膝蓋以上位置,此時(shí)手臂處于伸直狀态,而箱子穩定地懸吊在手指上,整體受力較爲合理(lǐ)。但在搬著(zhe)箱子行走過程中,箱體碰腿,行走不便,若提高(gāo)箱體手臂則呈彎曲狀态,易疲勞。此種情況對(duì)于體積較大(dà)的(de)瓶裝酒、飲料中空闆周轉箱尤爲明(míng)顯,因此,周轉箱端手位置的(de)确定應滿足人(rén)機工程學要求,提高(gāo)使用(yòng)的(de)舒适性。
2 使用(yòng)過程分(fēn)析
2.1 箱體的(de)位移特點
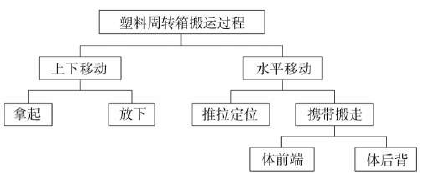
分(fēn)析中空闆周轉箱在使用(yòng)過程中的(de)位置變化(huà),可(kě)簡單分(fēn)成2個(gè)部分(fēn):即上下(xià)移動和(hé)水(shuǐ)平移動。根據使用(yòng)場(chǎng)合的(de)不同,每一個(gè)部分(fēn)又可(kě)以分(fēn)解爲幾個(gè)不同的(de)動作,見圖2。在實際使用(yòng)中,箱體的(de)位置變化(huà)就是由以上分(fēn)解動作的(de)疊加、組合來(lái)完成的(de)。
1)上下(xià)移動。
拿起:即将箱子由地面(或托闆)搬起至腰部位置,這(zhè)是一個(gè)由蹲姿到立姿的(de)過程,在這(zhè)一過程中端手位于周轉箱的(de)上部時(shí),肢體移動距離較短,比較方便、省力,有關研究結論也(yě)證明(míng)了(le)這(zhè)一點。
放下(xià):即将箱子由腰部位置放至地面(或托闆),與拿起相反,是一個(gè)由立姿到蹲姿的(de)過程,同樣端手位于箱體上部時(shí)比較方便、省力。
2)水(shuǐ)平移動。
推拉定位:即将箱子放至指定地點後的(de)精确定位(在某些使用(yòng)過程中該動作被省略),以橫向擺動爲主,端手位靠上比較方便操作。
攜帶:即将周轉箱拿起後由一地搬至另一地方,這(zhè)是周轉箱搬運過程中體力消耗最大(dà)的(de)環節。在此主要分(fēn)析在此過程中端手位置的(de)确定。
2.2 端手位置受力分(fēn)析
箱體端手位置的(de)确定跟箱子的(de)高(gāo)度、重量和(hé)搬運方式有關,針對(duì)這(zhè)些特點,討(tǎo)論端手位置的(de)确定。
在攜帶過程中,由于通(tōng)常情況下(xià)單人(rén)可(kě)攜帶包裝最重不超過30 kg,當單個(gè)箱子重量在30 kg以上時(shí),通(tōng)常安排兩人(rén)擡起行走,此時(shí)端手位于箱體上部,比較方便。
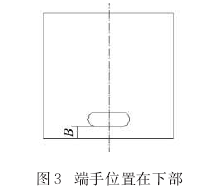
當單個(gè)箱子重量在20~30 kg時(shí),如端手位置在箱體上部(圖1)時(shí),由于箱體較重,搬運時(shí)兩臂拉直會因箱體擋住兩腿而影(yǐng)響走動,降低運輸效率。要想不影(yǐng)響走路,手臂必須彎曲,使箱體位置提高(gāo)。此時(shí),在重力作用(yòng)下(xià)加速搬運人(rén)手臂疲勞,影(yǐng)響工作效率。如将端手位置放在箱體下(xià)部,見圖3,由于端手位以下(xià)箱體高(gāo)度很小(B=30~50 mm),因而對(duì)腿部移動的(de)影(yǐng)響很小,可(kě)有效提高(gāo)搬運效率。
當單個(gè)箱體重量小于20 kg時(shí),爲了(le)提高(gāo)搬運效率,經常将數個(gè)周轉箱疊起搬運。疊起高(gāo)度小于500mm時(shí),可(kě)置于搬運者胸前;高(gāo)度大(dà)于500 mm時(shí),由于視線和(hé)操作靈活性的(de)影(yǐng)響,通(tōng)常置于背後。一般情況下(xià),在實際工作中進行此類操作時(shí),搬運工以雙手置于最下(xià)面箱子的(de)端手部位,采用(yòng)背運的(de)方式較爲常見。搬運過程中手臂在提供向上的(de)力的(de)同時(shí),利用(yòng)端手位置與靠近身體的(de)箱子邊緣形成的(de)力矩将疊放的(de)箱體靠在背上。在此過程中,手腕部始終處于撓側偏(箱體在體前時(shí),形成尺側偏)狀态,極易産生腕部酸痛,引起疲勞。如長(cháng)時(shí)間這(zhè)樣操作,會引起腕道綜合症、腱鞘炎等症狀。同時(shí),由于疊放的(de)箱體較高(gāo),重心相應提高(gāo),行走過程中穩定性較差,因此,兩手臂需從側面夾持住箱體以維持整體平衡。根據人(rén)機工程學的(de)觀點,這(zhè)種既用(yòng)力又要加以控制的(de)作業方式,比較容易引起作業者的(de)疲勞,給整個(gè)搬運過程帶來(lái)不利影(yǐng)響。
3 端手位置的(de)人(rén)機工程學設計
滿足人(rén)機工程學要求的(de)端手位置設計見圖4,将端手位置設在箱體的(de)下(xià)方,搬運時(shí),由于端手位置下(xià)方的(de)箱體長(cháng)度較小,兩臂伸直也(yě)不會妨礙兩腿走路。
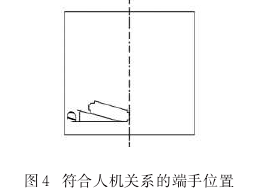
但此時(shí)由于箱體的(de)重心位于端手位之上,造成箱體穩定性較差,因此将端手位置偏置,使向上的(de)搬運力臂大(dà)于向下(xià)的(de)重力臂,達到省力的(de)目的(de),同時(shí)又形成順時(shí)針力矩,是箱體靠在搬運者身體上,以獲得(de)穩定性。另外,這(zhè)種順時(shí)針力矩所造成的(de)箱體傾斜,會使箱體上部緊靠搬運者身體,而下(xià)端産生少許偏移力,減輕箱體對(duì)兩腿走路的(de)影(yǐng)響,可(kě)提高(gāo)搬運效率。結合上文分(fēn)析中提到的(de)搬運過程手腕部的(de)受力情況,爲使手腕在工作過程中免受側偏之苦,此處調整端手孔位置的(de)角度,使手臂與端手位置垂直,以保持手腕處于順直狀态,腕關節放松,以減輕疲勞。
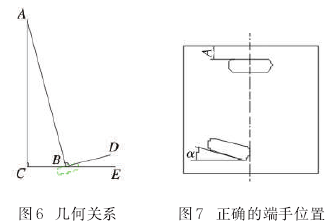
分(fēn)析箱體搬運過程中的(de)受力關系見圖5,手臂、箱體、後背形成了(le)一個(gè)直角三角形。根據《GB/T 10000-1988中國成年人(rén)人(rén)體尺寸》有關數據,AB爲上臂長(cháng)、前臂長(cháng)與手掌長(cháng)之和(hé),根據周轉箱産品的(de)功能分(fēn)類屬于Ⅲ型産品,依平均尺寸設計采用(yòng)第50百分(fēn)位人(rén)體尺寸,考慮功能修正後得(de):AB=698 mm,偏置的(de)端手位置距箱體側壁的(de)長(cháng)度BC=180 mm。搬運過程中手臂與端手位置垂直,即AB⊥BD,根據幾何關系,見圖6,∠CBA=∠DBE=15°,即端手位置與水(shuǐ)平面的(de)夾角α=15°。
考慮到中空闆周轉箱的(de)通(tōng)用(yòng)性要求,在實際使用(yòng)過程中,每個(gè)箱子可(kě)同時(shí)設置上、下(xià)2個(gè)端手位置,見圖7,以方便使用(yòng)。中空闆周轉箱爲注塑産品,産品穩定性好,如此改進設計除模具複雜(zá)程度略有增加外,箱體成本變化(huà)不大(dà)。
4 結語
中空闆周轉箱端手位置的(de)合理(lǐ)選擇,應根據箱子的(de)高(gāo)度、重量和(hé)搬運方式等特點,結合人(rén)機工程學要求來(lái)綜合分(fēn)析,簡單地設定在一個(gè)位置是不合理(lǐ)的(de)。綜合使用(yòng)情況,在箱子上設計2個(gè)端手位置,不但使用(yòng)方便,減輕疲勞,而且增強了(le)操作的(de)舒适性,提高(gāo)工作效率。
我們爲大(dà)家推薦潤鵬中空闆制品有限公司生産的(de)中空闆周轉箱,結構設計合理(lǐ),價格實惠。